“Ventilatore”
Macchina per la respirazione
assistita
Daniele Tommei - Digitarch Roma
Roma 8 Aprile 2020
L’obiettivo è stato quello di creare un
dispositivo di semplice ed economica produzione, con caratteristiche di base e
senza ambizioni di adattabilità universale, ma che, seppur solo nei casi più semplici,
possa essere utile. Questa macchina, nata per aiutare gli esseri umani con
difficoltà di respirazione, è stata pensata per essere facilmente costruita con
componenti di basso costo e di facile reperibilità (il costo di tutte le parti necessarie supera di poco i 100 euro).
E’ necessario precisare però che questa macchina non è un dispositivo medico e
non è stata certificata per nessuna delle caratteristiche elencate più avanti.
Tuttavia, malgrado i
limiti sopra esposti, considerata la praticità e semplicità del suo
funzionamento, abbiamo reso pubblico questo documento per permettere a chi lo
desidera, di realizzarlo per tenere in casa un dispositivo che ovviamente ci si
augura non debba mai essere utilizzato.
In questo documento e nei relativi allegati,
verranno incluse tutte le informazioni
necessarie per la realizzazione del ventilatore, e cioè: l’elenco dei
componenti e la loro reperibilità, gli schemi costruttivi (meccanico, elettrico
ed elettronico) nonché il codice sorgente del software per la programmazione
del microprocessore utilizzato.
Il principio di funzionamento di questa
macchina è basato sulla generazione ad intermittenza di aria ventilata da
inalare attraverso una maschera naso/bocca indossata dal paziente.

Brevi filmati
sul funzionamento in modalità autonoma


Breve filmato
sul funzionamento in modalità controllata dall’inspirazione (triggered)

Costituzione del dispositivo per ventilazione
assistita:
Le principali parti che compongono questa
macchina sono:
1)
un
ventilatore centrifugo ad alta pressione
2)
un
sensore di pressione differenziale
3)
un scheda
elettronica a microprocessore
4)
un
pannello di impostazioni dei parametri
5)
un
contenitore per applicazioni generiche
6)
un
alimentatore adattatore di rete
7)
un tubo
flessibile con mascherina naso/bocca
Descrizione
del funzionamento del ventilatore respiratorio
Un ciclo di respirazione umana fisiologica è
composta da queste tre fasi
-
inspirazione
(circa 1,3-1,5 secondi di durata)
-
espirazione
(circa 2,5-3 secondi di durata)
-
breve
pausa fra espirazione ed inspirazione (circa 0,5 secondi)
La naturale azione di inspirazione avviene
tramite l’ampliamento della cavità toracica ottenuta attraverso l’azione dei
diversi muscoli inspiratori.
Nel caso in cui il paziente abbia difficoltà
ad azionare i muscoli inspiratori per allargare l’arcata costale ed espandere
così il volume dei polmoni per inspirare l’aria, il ventilatore respiratorio
può essere d’aiuto immettendo direttamente l’aria nei polmoni, determinandone
l’espansione e alleggerendo così il carico ai muscoli inspiratori.
Questa immissione di aria deve essere sincronizzata
con il primo spontaneo movimento muscolare di inspirazione da parte del
paziente.
Entrando nello specifico il meccanismo di funzionamento
è il seguente:
appena il paziente tenta di inspirare si
genera una depressione, seppur minima, nei polmoni che viene rilevata dal sensore di pressione posto
nella mascherina. Il segnale rilevato dal sensore viene trasmesso al dispositivo
di ventilazione che immediatamente genera l’aria pressurizzata che viene
immessa nei polmoni. Finita la fase di immissione di aria, il ventilatore si
ferma ed il paziente, nei secondi successivi, ha modo di espirare
automaticamente l’aria dai polmoni. In questa seconda fase sono i polmoni
stessi che, senza alcun aiuto muscolare in virtù solo della loro elasticità,
espellono l’aria in essi contenuta.
Al termine della fase di espirazione, il ciclo
naturale di respirazione ricomincia e con esso anche l’azione del ventilatore.
Con questo sistema, l’immissione dell’aria nei polmoni avviene in modo sincrono
seguendo il naturale ciclo di respirazione del paziente.
Il ventilatore funzionerà anche se il paziente
non avesse la capacità di iniziare autonomamente la fase di inspirazione.
Infatti, il ventilatore è dotato di un timer che lo farà azionare in ogni caso
e cioè anche laddove non venisse rilevato alcun segnale di tentativo di
inspirazione. In questa ipotesi, trascorso il periodo impostato nel timer il
ventilatore immetterà comunque aria nei polmoni.
Quanto esposto riguarda il funzionamento del
ventilatore con modalità di rilevazione attivata. E’ però possibile impostare
il ventilatore in modalità autonoma.
In questa modalità il ventilatore immetterà
aria nei polmoni a cadenza regolare che prescinde da rilevazione o meno di
segnali di inizio di respirazione da parte del paziente. Ovviamente questa
modalità verrà adottata nei casi estremi, in cui il paziente non è in
condizioni di stimolare la respirazione assistita.
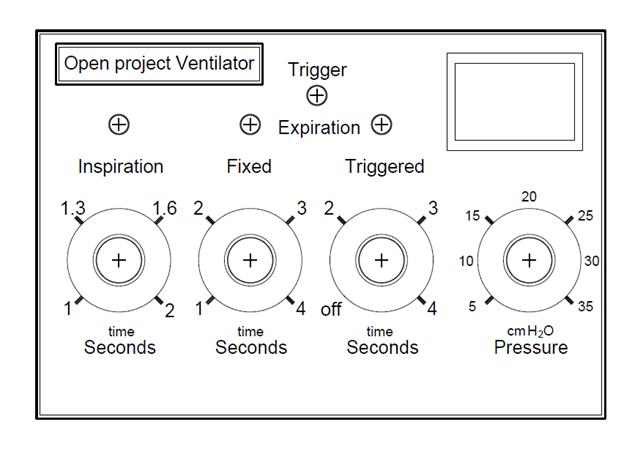
Pannello di controllo:
regolazioni ed indicatori
Sul pannello di
controllo frontale troviamo quattro manopole, un interruttore, e quatto spie
luminose a led.

-
La
manopola rossa (Inspiration) permette di impostare il tempo di inspirazione. Il
valore impostabile va da 1 a 2 secondi e determina per quanto tempo il
ventilatore genererà il flusso continuo di aria pressurizzata da inviare alla
mascherina del paziente
-
Il led
rosso sopra questa manopola indica che il ventilatore è in azione
-
La
manopola bianca (Expiration Fixed) determina la durata del periodo di espirazione. Il valore è
impostabile da 1 a 4 secondi e per questo periodo il ventilatore non produrrà
il flusso di aria permettendo al paziente di espirare l’aria contenuta nei
polmoni
-
Il led
verde sopra questa manopola indica che il ventilatore è fermo che siamo nella
fase di espirazione dell’aria
-
La
manopola di colore arancione (Expiration Triggered) invece determina il periodo massimo di attesa in cui il
ventilatore resta ancora fermo aspettando uno stimolo di inspirazione da parte
del paziente. Non appena il ventilatore, all’interno di questo periodo, rileva
uno stimolo di inspirazione (led rosso trigger),
immediatamente parte la ventilazione. Se non avviene alcuno stimolo di
inspirazione entro il periodo impostato (è impostabile fino a 4 secondi) il
ventilatore partirà comunque e verrà emesso un segnale acustico per avvertire
il personale di assistenza che il paziente non è stato in grado di inspirare da
solo.
-
Se questa
manopola arancione viene messa a zero (off) il ventilatore non resterà in
attesa dello stimolo inspiratorio ma finita la fase precedente di espirazione
(quella del led verde) il ventilatore partirà immediatamente.
-
Il led
giallo sopra questa manopola indica che il ventilatore è in attesa di uno
stimolo inspiratorio per poter attivare la ventola e generare l’aria
pressurizzata
-
Il led
rosso Trigger manda segnale luminoso
quando viene rilevata una pressione dell’aria negativa (tentativo di inspirazione
da parte del paziente) durante il periodo Expiration
“Triggered” impostato tramite la manopola arancione. Se questa manopola è
impostata ad “off” il led Trigger non verrà attivato.
-
La quarta
manopola, quella di colore blu (Pressure), determina la pressione
massima dell’aria in uscita dal ventilatore. Il valore pressione può essere
impostato da 5 a 35 cm. di H2O (da 0,5 a 3,5 KPa)
-
L’interruttore
in alto a destra 0/1 controlla l’accensione del dispositivo.
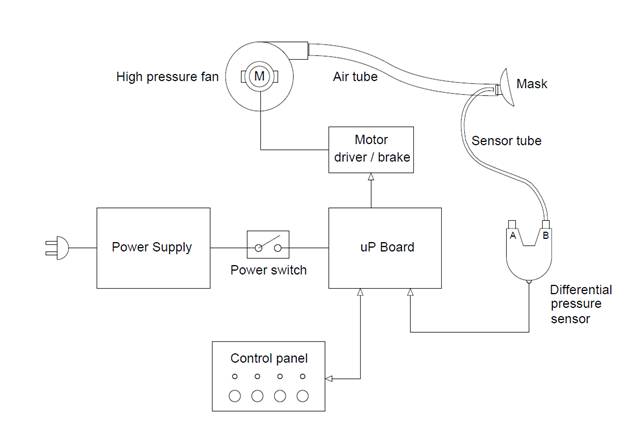
Descrizione delle parti e schema
di funzionamento
Questo dispositivo per la respirazione
assistita è costituito da queste quattro principali parti funzionali:
la ventola,
il sensore di pressione, il microcomputer, il pannello di controllo.
La prima di queste è una ventola
centrifuga ad alta pressione.
Questa viene azionata da un motorino elettrico
a corrente continua. La funzione di questa ventola è di aspirare l’aria
dall’esterno, pressurizzarla e inviarla, tramite un tubo flessibile, alla
mascherina indossata dal paziente. La
ventola è definita ad alta pressione, perché produce una “pressurizzazione”
dell’aria notevolmente superiore ad una normale ventola.
L’alta pressione, anche se poi non così alta,
deve però arrivare almeno a circa 20 cm. di H2O per garantire un valore
sufficiente a “gonfiare i polmoni”.
Per ottenere questa caratteristica, questo
tipo di ventole hanno una girante che ruota a velocità molto elevata,
normalmente superiore ai 10.000 giri al minuto e per questo motivo devono
essere ben costruite e bilanciate per minimizzare le vibrazioni ed il rumore
prodotto.
In questo progetto, al momento, è stato
privilegiato il basso costo ed è stata quindi utilizzata una ventola molto
economica (meno di 10 Euro) facilmente reperibile perché utilizzata in un
comune gonfiatore per gommoni a 12V.
Questa ventola, nel test che abbiamo eseguito, arriva a produrre una
pressione (con flusso zero) di 35 cmH2O.
Per ottenere questa pressione, però, è necessario un alimentatore a 12V.
che possa sostenere almeno 4A. continuativi (quello in dotazione non supera i
2A.)
La girante di questa ventola può ruotare a
diverse velocità in funzione della tensione applicata al suo motore. Poiché la
pressione del flusso d’aria generato dalla ventola è funzione della velocità di
rotazione, regolando la tensione elettrica sul motore, si regolerà la pressione
dell’aria generata.
La seconda parte funzionale, di
questo dispositivo di respirazione assistita, è il sensore di pressione.
All’interno del tubo di trasporto dell’aria,
che va dal ventilatore alla mascherina, è stato inserito un secondo tubicino
più sottile, che permette di misurare la pressione dell’aria inviata. Questo
tubicino percorre tutta la lunghezza del tubo più grande dove passa l’aria, partendo
dalla ventola per arrivare fino all’innesto sulla mascherina.
Mentre dal lato della mascherina questo
tubicino è lasciato aperto e non collegato a niente, dal lato del ventilatore è
connesso ad un sensore differenziale di
pressione.
L’altro ingresso, delle due entrate del
sensore di pressione, è lasciato aperto all’interno della scatola e non
connesso a niente (in realtà non è vero che non è connesso a niente: è stato
lasciato libero proprio per misurare la pressione all’interno della scatola).
Questo sensore differenziale ha il compito di
misurare la differenza di pressione tra i suoi due ingressi e trasformarla in segnale
che indicherà al microcomputer quale è la differenza del valore della pressione
dell’aria tra l’interno della scatola (che di fatto è la stessa della pressione
ambientale) e l’ingresso dell’aria nella mascherina.
Si è ritenuto opportuno prolungare il tubicino di misurazione fino alla
mascherina per migliorare la precisione della misurazione della pressione
dell’aria.
Se in condizioni di aria ferma la pressione è
infatti sempre la stessa in ogni punto del tubo, con l’aria in movimento ci
sarà una differenza di pressione dovuta alla perdita di carico tra l’inizio del
tubo, collegato alla ventola, e la fine del tubo collegato alla mascherina.
Inoltre, la vicinanza del punto di misurazione alla bocca/naso del paziente,
migliora la precisione e la rapidità di risposta del ventilatore al tentativo
di inspirazione del paziente.
Il sensore differenziale ha due funzioni:
-
la prima
funzionalità è di misurare la pressione positiva dell’aria pressurizzata
generata dalla ventola durante la fase di inspirazione del paziente, e che
dovrà mantenersi nei limiti impostati sul pannello di controllo. In questa fase
il microcomputer regolerà la velocità della girante della ventola per non
superare questi limiti.
-
la
seconda funzionalità invece è quella di rilevare il primo stimolo di
inspirazione subito dopo la fase di espirazione. In un certo lasso di tempo,
impostabile dal pannello di controllo, il sensore rileverà se si presenta un
rapido abbassamento della pressione, in seguito allo stimolo di inspirazione
del paziente e il microcomputer attiverà quindi immediatamente la generazione
di aria pressurizzata per aiutare il paziente a inspirare.
Il sensore utilizzato è il modello MPX5010DP
reperibile dalla RS-Components o da altri distributori di componenti
elettronici, ed ha una portata fino a 10KPa, cioè 100 cm. di H20, più che
sufficiente per le pressioni in gioco che non dovrebbero mai arrivare oltre ai
3,5KPa.
La terza parte funzionale è il
microcomputer.
Per questo dispositivo è stato utilizzato un
micro della serie Pic16F della ditta Microchip. Il modello scelto è il 16f1718
in versione DIP, che ha già al suo interno tutti i moduli funzionali necessari
a questo dispositivo di respirazione assistita come CLOCK, ROM, RAM, ADC, PWM,
ecc.
Il microcomputer può essere programmato da un
qualsiasi PC tramite una apposita interfaccia come il PICKIT3 o PICKIT4. Il
sistema di sviluppo è MPLABX ed è scaricabile gratuitamente dal sito della
Microchip. Il programma è stato scritto direttamente in codice macchina (MASM)
ed è documentato tra gli allegati.
Il microprocessore è montato su una scheda per
circuiti prototipali e non ha al momento un PCB dedicato, che comunque è
previsto se questa iniziativa avrà un minimo di seguito. Sulla scheda insieme
al micro, sono assemblati tutti gli altri componenti elettronici necessari al
funzionamento, come illustrato dallo schema elettrico allegato. Per l’alimentazione a 12V. del circuito è
stato utilizzato lo stesso adattatore di
rete fornito con il gonfiatore, ma naturalmente è consigliabile acquistarne uno
più robusto come per es. quello indicato nella lista delle principali parti
necessarie. Sarebbe anche consigliato
collegare anche una batteria tampone da 12V. di almeno 10Ah, o in alternativa
utilizzare un gruppo di continuità UPS per computer che garantisca il funzionamento
anche in caso di assenza di energia elettrica.
La quarta e ultima parte
funzionale è il pannello di controllo.
Il pannello è costituito semplicemente da 4
manopole e 4 led, oltre all’interruttore di accensione e ad un segnalatore
acustico all’interno della scatola.
Al momento abbiamo ritenuto di mantenere al
minimo tutte le possibile opzioni e variabili che possono servire ad adattare
il dispositivo a più casi particolari, privilegiando la semplicità e la facile
gestione anche da parte di una assistenza sanitaria casalinga.
Le 4 manopole regolano 4 diversi potenziometri
collegati al microcomputer e impostano i parametri necessari al voluto
funzionamento. I 4 led, ed il segnalatore acustico, anch’essi collegati al
microcomputer, segnalano i diversi stati del funzionamento per aiutare e
monitorare la corretta regolazione dei parametri.
Elenco delle parti principali

-
Ventola
centrifuga ad alta pressione (>20 cmH2O) completa di adattatore 12V. 2A
https://www.amazon.it/gp/product/B07QQXV74M


-
Contenitore
in plastica (180x110x90)
https://it.rs-online.com/web/p/contenitori-per-applicazioni-generiche/0832649/
https://it.rs-online.com/web/p/contenitori-per-applicazioni-generiche/0220440/

-
Microprocessore
Microchip Pic 16F1718 (DIL 28 pin)
https://it.rs-online.com/web/p/microcontroller/8417541/

-
Schede
pcb prototipali millefori
https://www.amazon.it/ELEGOO-Millefori-Prototipo-Circuito-Prototype/dp/B073WR78M6

-
Sensore
differenziale di pressione NXP mod. MPX5010DP
https://it.rs-online.com/web/p/sensori-di-pressione/7191080/

-
Potenziometri
e manopoline
https://www.amazon.it/GTIWUNG-Potenziometro-Rotativo-Regolabile-3-Terminale/dp/B07WQG1RNZ

-
Programmatore
per microprocessori Microchip
https://www.amazon.it/ARCELI-PICKIT3-Simulator-Programmer-Emulator/dp/B07BP65KQD/

-
Alimentatore
12 V. - 7.5A
https://www.amazon.it/Caricabatteria-Adattatore-Alimentatore-Pico-PSU-Connettore/dp/B07588717M/

-
Tubo
prolunga lavatrice
https://www.amazon.it/Xavax-HAMA-Prolunga-scarico-metri/dp/B003ZYRN1M/

-
Mascherina
https://www.amazon.it/gp/product/B00P3YRRMC
Costruzione meccanica

Per separare la ventola dal gonfiatore togliamo
semplicemente le due viti del coperchio posteriore. Quindi dissaldiamo i
collegamenti elettrici. Dal gonfiatore recuperiamo anche l’interruttore ed il
connettore di alimentazione.

La scatola che abbiamo utilizzato è molto piccola ma ha permesso comunque di
contenere tutto il necessario. Naturalmente è possibile utilizzarne di più
grandi.
Dopo aver forato la scatola sia sul fondo che
lateralmente con una punta a tazza da 31 mm di diametro, sagomiamo e foriamo un
rettangolo di pvc forex da 6-8 mm di spessore per fissarlo sul fondo della
scatola.
Con l’aiuto della dima in allegato possiamo praticare i fori sulla parte frontale per
i potenziometri, i led e l’interruttore on/off


A questo punto possiamo provare ad inserire la
ventola e adattare, se necessario, le asole


Assembliamo il circuito elettronico adattando
la dimensione del PCB millefori e
saldiamo i potenziometri sul lato inferiore e i led ed il resto dei componenti
sul lato superiore


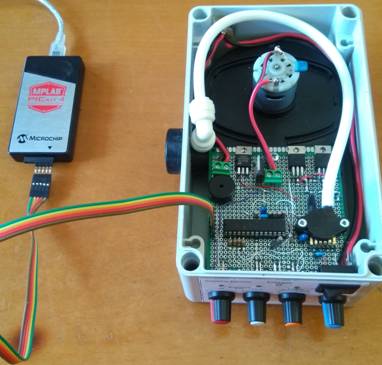
Il circuito mostrato è il prototipo e quindi i
collegamenti sono stati effettuati con dei fili
La scheda sarà fissata sul lato anteriore
della scatola tramite gli stessi potenziometri.


Sul bordo posteriore la scheda è invece stata
fissata direttamente sulla ventola tramite uno dei fori già presenti sulla
ventola stessa.
Sul bordo posteriore della scatola è stato
inserito il connettore di alimentazione, mentre sul lato anteriore è stato
inserito l’interruttore On/Off (entrambe prelevati dal gonfiatore).
Sulla bocca di uscita della ventola è stato
praticato un foro da 6 mm in cui viene inserito un tubetto di pochi centimetri
come mostrato. Questo è il sensore di pressione che verrà portato fino alla
mascherina. Nel lato interno alla scatola il tubicino, tramite un raccordo a
90°, andrà collegato al sensore di pressione sul lato indicato, corrispondente al
pin 6 (l’altro ingresso deve essere lasciato aperto). Dal lato esterno della scatola
nel tubicino viene inserito un tubo metallico che farà da raccordo col il resto
del tubicino che andrà alla mascherina.




Il tubicino, passando all’interno del tubo
principale dell’aria da 30 mm., arriverà in prossimità della mascherina indossata
dal paziente. In questo modo la pressione rilevata sarà proprio quella che
viene inspirata dal paziente. Inoltre viene ridotto al minimo il tempo
necessario per rilevare l’abbassamento di pressione indotto dal tentativo di
inspirazione e quindi la successiva partenza della ventola.

Il tubo dell’aria collegato al respiratore è
raccordato con la ventola utilizzando uno spezzone di comune tubo idraulico PVC
e riscaldato per allargarne il diametro interno a circa 30.5 mm.




Dall’altra estremità del tubo, l’innesto con
la mascherina è ottenuto tramite un raccordo.



Sulla mascherina si può notare anche una
seconda entrata a cui si può applicare, opzionalmente in caso di necessità, il
tubicino dell’ossigeno che va alla bombola o ad una macchina per la
concentrazione dell’ossigeno.
Note tecniche sulle caratteristiche e miglioramenti futuri
Il
cuore di questo dispositivo è il sistema di generazione dell’aria
pressurizzata. Per adempiere a questa funzione in questa macchina è stato utilizzata
una piccola ventola con motore a spazzole a corrente continua. Questa scelta è
stata dettata principalmente dalla facile reperibilità e dal basso costo, ma
naturalmente a scapito delle caratteristiche. I punti critici di questo tipo di
ventole sono il rumore, la pressione non molto elevata e l’inerzia nel
raggiungere il necessario regime di rotazione, che si traduce in un ritardo
nella generazione dell’aria pressurizzata dal momento in cui viene attivata la
richiesta.
Abbiamo
provato diversi tipi di ventole commerciali e ne stiamo provando altre. La
scelta migliore sarà quella di ricorrere a una ventola con una piccola girante
(impeller), ma con regimi di rotazione molto alti, superiori ai 30.000 rpm. Le
ventole di questa tipologia utilizzano un motore di tipo brushless. Purtroppo queste ventole, oltre ad essere di
più difficoltosa reperibilità, hanno un costo più elevato e richiedono una
aggiuntiva complessità circuitale per il loro funzionamento. Il modello che
potrebbe essere un perfetto sostituto della attuale ventola è il WM7040 che può
arrivare ad una pressione superiore ai 60 cmH2O. Questo modello, corredato
dalla sua scheda driver, può essere
facilmente inserito nell’attuale circuito, utilizzando, come controllo della
velocità di rotazione, il segnale PWM che attualmente arriva al gate del mosfet
di potenza IRLZ44.
Il software di programmazione per il
microprocessore è stato sviluppato sulla piattaforma MPLABX della microchip
(scaricabile gratuitamente dal loro sito) utilizzando un personal computer con
Windows. Il programma di controllo per
il uP è stato scritto direttamente in codice nativo del micro. Per la
programmazione poi è utilizzato un cavetto a cinque poli che accede
direttamente al micro tramite un connettore sulla scheda. Abbiamo usato il
programmatore PICKIT4 ma può essere utilizzato qualsiasi altro sistema di
programmazione tra quelli compatibili con questa famiglia di uP. Tutto il
codice sorgente è incluso tra gli allegati di questo progetto.
Il codice non è molto complesso e può essere facilmente
modificato per essere adattato a diverse esigenze.
Di seguito è riportato il diagramma di flusso
che riassume il meccanismo di controllo del uP. sull’hardware ad esso
interconnesso.
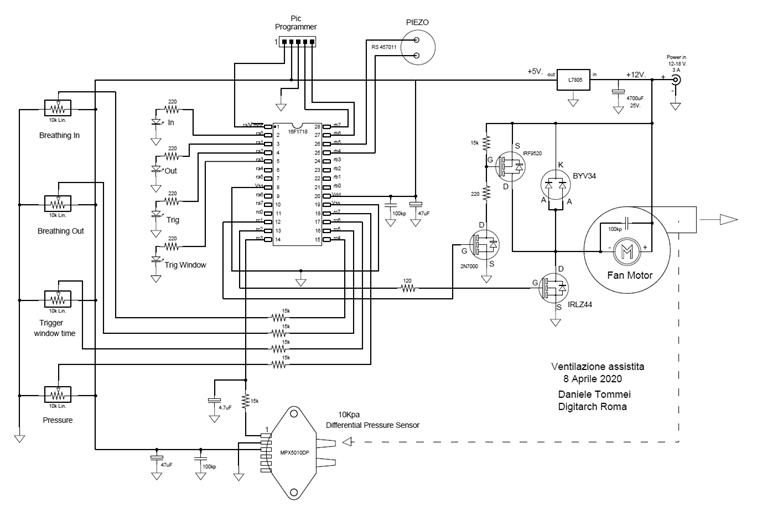
Descrizione del funzionamento
elettrico
Il circuito è basato su un uP programmabile in-line
della microchip con clock interno settato a 16 Mhz. Il circuito di controllo è
costituito da 4 led di segnalazione ottica e 4 potenziometri che forniscono 4 valori da 0 a 5V. sugli ingressi
del uP e da un segnalatore acustico piezoelettrico.
L’alimentazione è predisposta per una tensione
di 12V. per un assorbimento di circa 4 ampere di corrente. La tensione della
parte logica è di 5V. ed è generata da uno stabilizzatore lineare L7805.
La velocità della ventola controllata dal
mosfet a canale N IRLZ44 che è direttamente pilotato sul gate da una uscita del
uP 16F1718. La corrente di questa uscita è sufficiente a garantire un tempo di
commutazione di circa 2 uS, abbastanza breve per utilizzare un segnale PWM con
ciclo di 250 uS ovvero di 4 Khz.

Segnale sul gate
del mosfet IRLZ44
In parallelo al motore è utilizzato un diodo
veloce BYV34 come “freewheeling” per il recupero della corrente. Inoltre sempre
in parallelo al motore è stato utilizzato un mosfet a canale P per
cortocircuitare e frenare il motore stesso, riducendo il tempo della fase di
decelerazione quando la ventola deve essere fermata rapidamente.
Il sensore di pressione differenziale MPX5010
produce una tensione raziometrica che va da 0 alla tensione di alimentazione
(5V.) in funzione della differenza di pressione tra i due ingressi pneumatici.
Con una pressione uguale su i due ingressi la tensione in uscita è di circa
0.5V mentre con una differenza di 10KPa (100 cmH2O) la tensione è di circa 4.5V
E’ da notare che il sensore può rilevare anche una leggera pressione negativa
portando i 0.5V in uscita fino a 0 V.
Il sensore è collegato tramite un tubicino
alla uscita della ventola per poterne misurare la pressione in riferimento a
quella ambiente, rilevata dalla seconda entrata del sensore lasciata libera.
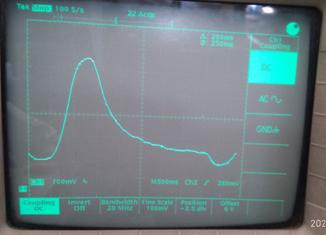
Andamento della
pressione letto sul sensore
Nell’immagine
sopra possiamo individuare la fase di immissione dell’aria (salita ripida) e la
fase di espirazione (discesa asintotica)
seguita infine dalle fase di trigger con pressione negativa.
Tutta la documentazione in allegato (in italiano) potete
trovarla qui:
Per informazioni, suggerimenti od altre richieste
potete scrivere a:
home page:
http://digitarch.net/Ventilatore.htm